Zur Messwertaufnahme und -aufbereitung werden ein MSP430F5529 sowie zwei MSP430G2553 von Texas Instruments verwendet, deren Firmware selbst geschrieben wurde. Die kleineren MSP430G2553 Controller übernehmen Unteraufgaben und verwalten das Spektrometer sowie das Geiger-Müller-Zählrohr, während der stärkere und großzügiger ausgestatte MSP430F5529 das Herzstück der Sensorik bildet. Neben der Aufnahme aller Messwerte kommuniziert er mit einem Raspberry Pi (nachfolgend RPi), welcher die Daten in Datenbanken speichert und zur Bodenstation sendet. Informationen zum RPi sowie zur Datenkommunikation finden sich in einem separaten Artikel unter RPi – Hardware.
Der gesamte Aufbau der Sensorik ist im nachfolgenden Bild dargestellt.
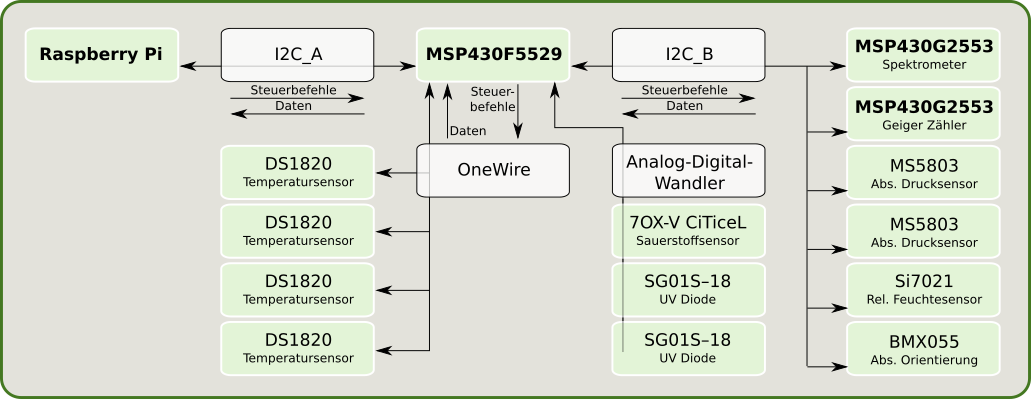
Eine detaillierte Übersicht der einzelnen Sensoren sowie deren Platzierung an der Sonde ist in den jeweiligen Artikeln zu finden. Hier wird genauer auf die Mikrocontroller der MSP430 Serie eingegangen.
Texas Instruments MSP430 Serie
Von TI als Ultra-Low-Power Mikrocontroller beworben, ist diese Reihe auf niedrigen Energieverbrauch optimiert und mit verschiedensten Energiesparmodi ausgestattet. Sie eignet sich besonders in Batterie betriebenen oder anderen Anwendungen mit limitierter Energieversorgung. Die Peripherie unterscheidet sich je nach Unterfamilie und umfasst u.a. Hardwareunterstützung für Kommunikationsprotokolle wie I2C, SPI oder UART, integrierte AD-Wandler von 10 bis 24 Bit, Direct Memory Access, verschiedene 16-Bit Timer inklusive Watchdog, kapazitive Touch-IO, Komparatoren, ein System zur Tatkerzeugung, Hardware Multiplikator und Real-Time Clock features. Der verwendete MSP430F5529 bietet alle genannten Funktionen und einen 12 Bit AD-Wandler, die MSP430G2553 bieten einen verkleinerten Funktionsumfang und werden hauptsächlich für die Datenübertragung mit Hilfe der in Hardware integrierten Schnittstellen genutzt. Für mehr Informationen siehe http://www.ti.com/lsds/ti/microcontrollers_16-bit_32-bit/msp/overview.page
Aufbau der Firmware – MSP430F5529
Der MSP430F5529 bildet die Schnittstelle zwischen dem Rpi und den einzelnen Sensoren. Er nimmt Messdaten auf und bereitet diese zur Übertragung an den Rpi sowie die Bodenstation vor. Die Firmware des MSP430F5529 ist in C geschrieben und in mehrere Abschnitte unterteilt, wie in der nachfolgenden Abbildung dargestellt:
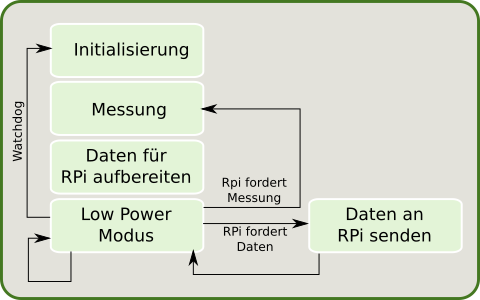
Den Großteil der Zeit befindet sich der Mikrocontroller in einem Energiesparmodus, in welchem die CPU mitsamt einiger peripherer Baugruppen ausgeschaltet ist. Dieser Modus wird nur verlassen, wenn der RPi einen entsprechenden Steuerbefehl an den MSP430F5529 sendet und entweder die Übertragung von Daten oder eine neue Messung anfordert. Ein Watchdog Timer führt einen Reset durch, falls über einen längeren Zeitraum kein Steuerbefehl mehr erhalten wurde.